1-dimensional Burgers’ equation¶
Output:¶
Source:¶
#!/usr/bin/env python
# encoding: utf-8
r"""
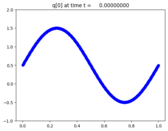
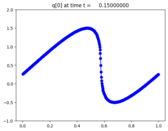
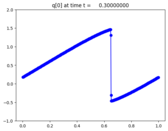
Burgers' equation
=========================
Solve the inviscid Burgers' equation:
.. math::
q_t + \frac{1}{2} (q^2)_x = 0.
This is a nonlinear PDE often used as a very simple
model for fluid dynamics.
The initial condition is sinusoidal, but after a short time a shock forms
(due to the nonlinearity).
"""
import numpy as np
from clawpack import riemann
def setup(use_petsc=0,kernel_language='Fortran',outdir='./_output',solver_type='classic'):
if use_petsc:
import clawpack.petclaw as pyclaw
else:
from clawpack import pyclaw
if kernel_language == 'Python':
riemann_solver = riemann.burgers_1D_py.burgers_1D
elif kernel_language == 'Fortran':
riemann_solver = riemann.burgers_1D
if solver_type=='sharpclaw':
solver = pyclaw.SharpClawSolver1D(riemann_solver)
else:
solver = pyclaw.ClawSolver1D(riemann_solver)
solver.limiters = pyclaw.limiters.tvd.vanleer
solver.kernel_language = kernel_language
solver.bc_lower[0] = pyclaw.BC.periodic
solver.bc_upper[0] = pyclaw.BC.periodic
x = pyclaw.Dimension(0.0,1.0,500,name='x')
domain = pyclaw.Domain(x)
num_eqn = 1
state = pyclaw.State(domain,num_eqn)
xc = state.grid.x.centers
state.q[0,:] = np.sin(np.pi*2*xc) + 0.50
state.problem_data['efix']=True
claw = pyclaw.Controller()
claw.tfinal = 0.5
claw.solution = pyclaw.Solution(state,domain)
claw.solver = solver
claw.outdir = outdir
if outdir is None:
claw.output_format = None
claw.setplot = setplot
claw.keep_copy = True
return claw
def setplot(plotdata):
"""
Plot solution using VisClaw.
"""
plotdata.clearfigures() # clear any old figures,axes,items data
# Figure for q[0]
plotfigure = plotdata.new_plotfigure(name='q[0]', figno=0)
# Set up for axes in this figure:
plotaxes = plotfigure.new_plotaxes()
plotaxes.xlimits = 'auto'
plotaxes.ylimits = [-1., 2.]
plotaxes.title = 'q[0]'
# Set up for item on these axes:
plotitem = plotaxes.new_plotitem(plot_type='1d')
plotitem.plot_var = 0
plotitem.plotstyle = '-o'
plotitem.color = 'b'
return plotdata
if __name__=="__main__":
from clawpack.pyclaw.util import run_app_from_main
output = run_app_from_main(setup,setplot)
