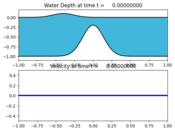
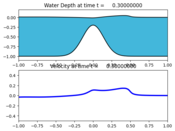
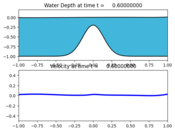
1-dimensional shallow water equation¶
Output:¶
Source:¶
#!/usr/bin/env python
# encoding: utf-8
r"""
Shallow water flow
==================
Solve the one-dimensional shallow water equations including bathymetry:
.. math::
h_t + (hu)_x & = 0 \\
(hu)_t + (hu^2 + \frac{1}{2}gh^2)_x & = -g h b_x.
Here h is the depth, u is the velocity, g is the gravitational constant, and b
the bathymetry.
"""
import numpy
from clawpack import riemann
def setup(kernel_language='Fortran', solver_type='classic', use_petsc=False,
outdir='./_output'):
if use_petsc:
import clawpack.petclaw as pyclaw
else:
from clawpack import pyclaw
if kernel_language == 'Fortran':
solver = pyclaw.ClawSolver1D(riemann.shallow_bathymetry_fwave_1D)
elif kernel_language == 'Python':
solver = pyclaw.ClawSolver1D(riemann.shallow_1D_py.shallow_fwave_1d)
solver.kernel_language = 'Python'
solver.limiters = pyclaw.limiters.tvd.vanleer
solver.fwave = True
solver.num_waves = 2
solver.num_eqn = 2
solver.bc_lower[0] = pyclaw.BC.extrap
solver.bc_upper[0] = pyclaw.BC.extrap
solver.aux_bc_lower[0] = pyclaw.BC.extrap
solver.aux_bc_upper[0] = pyclaw.BC.extrap
xlower = -1.0
xupper = 1.0
x = pyclaw.Dimension( xlower, xupper, 500, name='x')
domain = pyclaw.Domain(x)
state = pyclaw.State(domain, 2, 1)
# Gravitational constant
state.problem_data['grav'] = 9.8
state.problem_data['dry_tolerance'] = 1e-3
state.problem_data['sea_level'] = 0.0
xc = state.grid.x.centers
state.aux[0, :] = 0.8 * numpy.exp(-xc**2 / 0.2**2) - 1.0
state.q[0, :] = 0.1 * numpy.exp(-(xc + 0.4)**2 / 0.2**2) - state.aux[0, :]
state.q[1, :] = 0.0
claw = pyclaw.Controller()
claw.keep_copy = True
claw.tfinal = 1.0
claw.solution = pyclaw.Solution(state, domain)
claw.solver = solver
claw.setplot = setplot
claw.write_aux_init = True
if outdir is not None:
claw.outdir = outdir
else:
claw.output_format = None
return claw
#--------------------------
def setplot(plotdata):
#--------------------------
"""
Specify what is to be plotted at each frame.
Input: plotdata, an instance of visclaw.data.ClawPlotData.
Output: a modified version of plotdata.
"""
plotdata.clearfigures() # clear any old figures,axes,items data
# Plot variables
def bathy(current_data):
return current_data.aux[0, :]
def eta(current_data):
return current_data.q[0, :] + bathy(current_data)
def velocity(current_data):
return current_data.q[1, :] / current_data.q[0, :]
rgb_converter = lambda triple: [float(rgb) / 255.0 for rgb in triple]
# Figure for depth
plotfigure = plotdata.new_plotfigure(name='Depth', figno=0)
# Axes for water depth
plotaxes = plotfigure.new_plotaxes()
plotaxes.xlimits = [-1.0, 1.0]
plotaxes.ylimits = [-1.1, 0.2]
plotaxes.title = 'Water Depth'
plotaxes.axescmd = 'subplot(211)'
plotitem = plotaxes.new_plotitem(plot_type='1d_fill_between')
plotitem.plot_var = eta
plotitem.plot_var2 = bathy
plotitem.color = rgb_converter((67,183,219))
plotitem = plotaxes.new_plotitem(plot_type='1d_plot')
plotitem.plot_var = bathy
plotitem.color = 'k'
plotitem = plotaxes.new_plotitem(plot_type='1d_plot')
plotitem.plot_var = eta
plotitem.color = 'k'
# Axes for velocity
plotaxes = plotfigure.new_plotaxes()
plotaxes.axescmd = 'subplot(212)'
plotaxes.xlimits = [-1.0, 1.0]
plotaxes.ylimits = [-0.5, 0.5]
plotaxes.title = 'Velocity'
plotitem = plotaxes.new_plotitem(plot_type='1d_plot')
plotitem.plot_var = velocity
plotitem.color = 'b'
plotitem.kwargs = {'linewidth':3}
return plotdata
if __name__=="__main__":
from clawpack.pyclaw.util import run_app_from_main
output = run_app_from_main(setup,setplot)
