Shallow water Riemann solvers in Clawpack¶
A wide range of shallow water (SW) solvers are available in clawpack.riemann. Here’s a brief description of each. For each one, we have indicated (after “Fortran:”) the files you should compile to use it in the Fortran codes, and after “PyClaw” where you should import it from to use it in Python. If a pure-Python implementation is available, we also indicate that. Finally, we include links to examples that use each solver.
One dimension¶
For most 1D solvers, the vector q of conserved quantities is
where \(h\) is depth and \(hu\) is momentum. Solvers with a tracer include that as a 3rd component. For solvers with bathymetry, the bathymetry is the first (and only) component of aux. All solvers require setting a constant parameter grav, which controls the force of gravity.
Basic Roe solver: The most basic solver. Uses Roe’s linearization, with an entropy fix.
Fortran code: rp1_shallow_roe_with_efix.f90
PyClaw import: riemann.shallow_roe_with_efix_1D
Pure Python code: riemann.shallow_1D_py.shallow_roe_1D
Examples:
HLL solver: Also basic; uses HLL instead of Roe.
Pure Python riemann.shallow_1D_py.shallow_hll_1D
Roe solver with a tracer: Uses Roe’s linearization and add a 3rd equation to advect a passive tracer. Useful if you want to track which bit of water went where.
Fortran code: rp1_shallow_roe_tracer.f90
PyClaw import: riemann.shallow_roe_tracer_1D
Examples:
F-wave solver with bathymetry: Use this one if you have varying bathymetry. Uses the \(f\)-wave approach to incorporate source terms from bathymetry. Well-balanced.
Fortran: rp1_shallow_bathymetry_fwave.f90
PyClaw: riemann.shallow_bathymetry_fwave_1D
Pure Python: riemann.shallow_1D_py.shallow_fwave_1D
Examples:
Two dimensions¶
For most 2D solvers, the vector q of conserved quantities is
where \(h\) is depth and \(hu, hv\) are the \(x\)- and \(y\)-components of momentum. For solvers with bathymetry, the bathymetry is the first (and only) component of aux. For the mapped solver, see the implementation for a description of aux. As in 1D, all solvers require setting a constant parameter grav, which controls the force of gravity.
Basic Roe solver: The most basic solver. Uses Roe’s linearization, with an entropy fix. Normal and transverse solvers available.
Fortran code: rpn2_shallow_roe_with_efix.f90, rpt2_shallow_roe_with_efix.f90
PyClaw import: riemann.shallow_roe_with_efix_2D.
Examples:
F-wave solver with bathymetry: Use this one if you have varying bathymetry but no dry states. Uses the \(f\)-wave approach to incorporate source terms from bathymetry. Well-balanced. Normal solver only.
Fortran: rpn2_shallow_bathymetry_fwave.f90.
PyClaw: riemann.shallow_bathymetry_fwave_2D.
Mapped solver for the sphere: Uses grid mapping to solve the shallow water equations on the sphere. Does not include bathymetry. Both normal and transverse solvers available.
PyClaw: riemann.shallow_sphere_2D
Examples:
GeoClaw “augmented” solver: This is the most robust (but also the most costly) solver. Used in GeoClaw. Augmented solver (with extra waves) to handle bathymetry, and dry states. Both normal and transverse solvers available.
Fortran: rpn2_geoclaw.f, rpt2_geoclaw.f
PyClaw import: (normal solver only) riemann.sw_aug_2d
Examples:
Layered shallow water equations¶
1D and 2D solvers for the layered shallow water equations are also included.
Potentially useful contributions (what’s missing)¶
2D mapped grid solvers (for a planar grid)
Transverse versions of rpn2_shallow_bathymetry_fwave.f90, rpn2_sw_aug.f90.
Demonstrations¶
%matplotlib inline
import matplotlib.pyplot as plt
from clawpack import riemann
from clawpack.riemann import riemann_tools
import numpy as np
h_l = 1.; h_r = 0.5;
u_l = 0.; u_r = 0.;
q_l = np.array([h_l,u_l]); q_r = np.array([h_r,u_r])
problem_data={'grav':1.0,'efix':False}
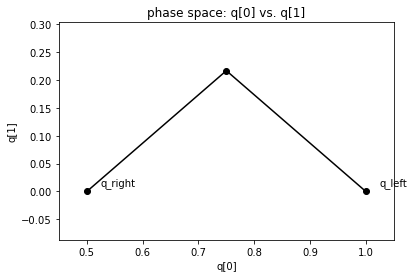
Roe¶
states, speeds, reval = riemann_tools.riemann_solution(riemann.shallow_1D_py.shallow_roe_1D,q_l,q_r,
problem_data=problem_data)
riemann_tools.plot_phase(states)
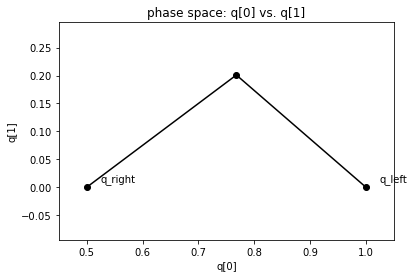
HLL¶
states, speeds, reval = riemann_tools.riemann_solution(riemann.shallow_1D_py.shallow_hll_1D,q_l,q_r,
problem_data=problem_data)
riemann_tools.plot_phase(states)

Version 5.14.x
Related Topics
- Documentation overview
- Previous: Riemann solvers
- Next: Plotting with Visclaw